 如何切换进程?
要从用户模式切换到内核模式
访问了内核区域,触发一般保护故障
进程:一个正在运行程序的抽象,程序的一次执行。
程序:指令的有序集合。
·Linux:创建进程使用系统调用fork()+execve()
·Windows:CreateProcess()
·父进程 shell
·子进程 hello
在./hello->shell 中 fork()+execute()
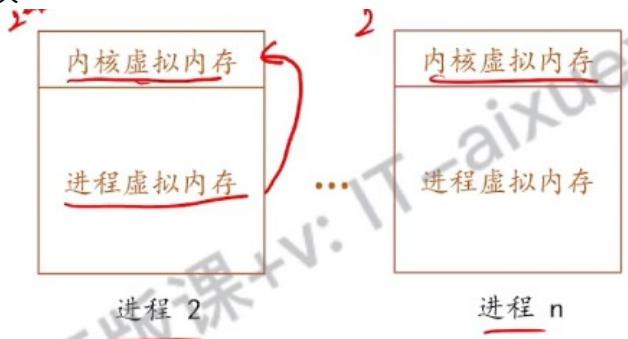
父进程和子进程具有独立的但是相同的虚拟地址空间
Init——最初的父进程
树形的关系
进程运行时有独立的虚拟地址空间

### 进程的创建
1. 系统初始化(操作系统启动过程中)
2. 正在运行的程序执行了创建进程的系统调用(fork)
3. 用户请求创建一个新进程
4. 一个批处理作业的初始化
程序是静态的
一个程序对应一个进程
进程是具有一定独立功能的程序关于讴歌数据集合的一次运行过程,是系统进行资源分配和调度的一个独立单位。
**进程的特征**
结构特征
动态性
并发性
独立性
异步性
结构性
程序的并发执行:多个程序共享资源,并发运行
1. 间断性。并发程序并不是一气呵成的,中间总会因此彼此间的各种制约关系出现暂停,因为系统只有一个 CPU
2. 失去封闭性而导致程序运行结果不可再现性,即对没有对资源的互斥共享
3. 静态程序结构不能支持并发运行的实现
**进程控制**
分配内存资源、回收内存资源、控制状态转换
**进程互斥**
互斥方式:多个进程载访问某些共享资源(临界资源)应采用互斥的方式访问
同步方式:多个进程相互合作完成一些共同任务,前驱满足后继
进程通信近九成之间的信息交换
**调度**
对资源或人物进行合理分配和管理
能够后背队列中按照一定的算法选择若干个作业调入内存,为他们创建进程,分配必要资源,插入就绪队列.
4. **进程与程序的区别**
(1)从定义上看,程序是一组指令的有序集合;进程是程序的运行过程;
(2)从结构上看,进程不仅包含程序段,还包含数据段和 PCB;
(3)进程是动态性,而程序是静态的;
(4)进程可独立地、并发地执行,程序则不能独立、并发执行
5. **进程与程序的对应关系**
‐ 在某个时刻一个进程对应于一个程序;
‐ 在整个生命周期中,进程可执行多个程序;( fork+exec )
‐ 一个程序多次执行则将对应多个进程;
### 进程控制块/进程表
PCB(struct)
进程描述信息
进程控制和管理信息
资源分配清单
处理机相关信息
进程控制块/进程表
PCB struct{}
如何切换进程?
要从用户模式切换到内核模式
访问了内核区域,触发一般保护故障
进程:一个正在运行程序的抽象,程序的一次执行。
程序:指令的有序集合。
·Linux:创建进程使用系统调用fork()+execve()
·Windows:CreateProcess()
·父进程 shell
·子进程 hello
在./hello->shell 中 fork()+execute()
父进程和子进程具有独立的但是相同的虚拟地址空间
Init——最初的父进程
树形的关系
进程运行时有独立的虚拟地址空间

### 进程的创建
1. 系统初始化(操作系统启动过程中)
2. 正在运行的程序执行了创建进程的系统调用(fork)
3. 用户请求创建一个新进程
4. 一个批处理作业的初始化
程序是静态的
一个程序对应一个进程
进程是具有一定独立功能的程序关于讴歌数据集合的一次运行过程,是系统进行资源分配和调度的一个独立单位。
**进程的特征**
结构特征
动态性
并发性
独立性
异步性
结构性
程序的并发执行:多个程序共享资源,并发运行
1. 间断性。并发程序并不是一气呵成的,中间总会因此彼此间的各种制约关系出现暂停,因为系统只有一个 CPU
2. 失去封闭性而导致程序运行结果不可再现性,即对没有对资源的互斥共享
3. 静态程序结构不能支持并发运行的实现
**进程控制**
分配内存资源、回收内存资源、控制状态转换
**进程互斥**
互斥方式:多个进程载访问某些共享资源(临界资源)应采用互斥的方式访问
同步方式:多个进程相互合作完成一些共同任务,前驱满足后继
进程通信近九成之间的信息交换
**调度**
对资源或人物进行合理分配和管理
能够后背队列中按照一定的算法选择若干个作业调入内存,为他们创建进程,分配必要资源,插入就绪队列.
4. **进程与程序的区别**
(1)从定义上看,程序是一组指令的有序集合;进程是程序的运行过程;
(2)从结构上看,进程不仅包含程序段,还包含数据段和 PCB;
(3)进程是动态性,而程序是静态的;
(4)进程可独立地、并发地执行,程序则不能独立、并发执行
5. **进程与程序的对应关系**
‐ 在某个时刻一个进程对应于一个程序;
‐ 在整个生命周期中,进程可执行多个程序;( fork+exec )
‐ 一个程序多次执行则将对应多个进程;
### 进程控制块/进程表
PCB(struct)
进程描述信息
进程控制和管理信息
资源分配清单
处理机相关信息
进程控制块/进程表
PCB struct{}
| 进程管理 寄存器 程序计数器 程序状态字 堆栈指针 进程状态 优先级 调度参数 进程ID 父进程 进程组 信号 进程开始时间 使用的CPU时间 子进程的CPU时间 下次报警时间 | 存储管理 正文段指针 数据段指针 堆栈段指针 | 文件管理 根目录 工作目录 文件描述符 用户ID 组ID |
| 时间 | Process0 | Process1 | 注 |
| 1 | 运行 | 就绪 | |
| 2 | 运行 | 就绪 | |
| 3 | 运行 | 就绪 | Process0发起I/O |
| 4 | 阻塞 | 运行 | Process0被阻塞 |
| 5 | 阻塞 | 运行 | 所以Process1运行 |
| 6 | 阻塞 | 运行 | |
| 7 | 就绪 | 运行 | I/O完成 |
| 8 | 就绪 | 运行 | Process1现在完成 |
| 9 | 运行 | - | |
| 10 | 运行 | - | Process0现在完成 |
| 算法 | 思想&规则 | 可抢占? | 优点 | 缺点 | 考虑到等待时间&运行时间? | 会导致饥饿? |
| FCFS | 自己回忆 | 非抢占式 | 公平;实现简单 | 对短作业不利 | 等待时间√运行时间× | 不会 |
| SJF/SPF | 自己回忆 | 默认为非抢占式,也有SJF的抢占式版本最短剩余时间优先算法(SRTN) | “最短的”平均等待/周转时间; | 对长作业不利,可能导致饥饿;难以做到真正的短作业优先 | 等待时间×运行时间√ | 会 |
| HRRN | 自己回忆 | 非抢占式 | 上述两种算法的权衡折中,综合考虑的等待时间和运行时间 | 等待时间√运行时间√ | 不会 |
| 算法 | 思想&规则 | 可抢占? | 优点 | 缺点 | 会导致饥饿? | 补充 |
| 时间片轮转 | 抢占式 | 公平,适用于分时系统 | 频繁切换有开销,不区分优先级 | 不会 | 时间片太大或太小有何影响? | |
| 优先级调度 | 有抢占式的,也有非抢占式的。注意做题时的区别 | 区分优先级,适用于实时系统 | 可能导致饥饿 | 会 | 动态/静态优先级。各类型进程如何设置优先级?如何调整优先级? | |
| 多级反馈队列 | 较复杂,注意理解 | 抢占式 | 平衡优秀666 | 一般不说它有缺点,不过可能导致饥饿 | 会 |
| 共同点 | 区别 | |
| 死锁 | 都是进程无法顺利向前推进的现象(故意设计的死循环除外) | 死锁一定是“循环等待对方手里的资源”导致的,因此如果有死锁现象,那至少有两个或两个以上的进程同时发生死锁。另外,发生死锁的进程一定处于阻塞态。 |
| 饥饿 | 可能只有一个进程发生饥饿。发生饥饿的进程既可能是阻塞态(如长期得不到需要的I/O设备),也可能是就绪态(长期得不到处理机) | |
| 死循环 | 可能只有一个进程发生死循环。死循环的进程可以上处理机运行(可以是运行态),只不过无法像期待的那样顺利推进。死锁和饥饿问题是由于操作系统分配资源的策略不合理导致的,而死循环是由代码逻辑的错误导致的。死锁和饥饿是管理者(操作系统)的问题,死循环是被管理者的问题。 |
| 最大需求 | 已借走 | 最多还会借 | |
| B | 70 | 20+30=60 | 50-30=20 |
| A | 40 | 10 | 30 |
| T | 50 | 30 | 20 |
| 最大需求 | 已借走 | 最多还会借 | |
| B | 70 | 20 | 50 |
| A | 40 | 10+20=30 | 30-20=10 |
| T | 50 | 30 | 20 |
| 最大需求 | 已借走 | 最多还会借 | |
| B | 70 | 20 | 50 |
| A | 40 | 10 | 30 |
| T | 50 | 30 | 20 |
| 进程 | 最大需求 | 已分配 | 最多还需要 |
| P0 | (7,5,3) | (0,1,0) | (7,4,3) |
| P1 | (3,2,2) | (2,0,0) | (1,2,2) |
| P2 | (9,0,2)减 | (3,0,2) | (6,0,0) |
| P3 | (2,2,2) | (2,1,1) | (0,1,1) |
| P4 | (4,3,3) | (0,0,2) | (4,3,1) |
| 进程 | 最大需求 | 已分配 | 最多还需要 |
| P0 | (7,5,3) | (0,1,0) | (7,4,3) |
| P2 | (9,0,2) | (3,0,2) | (6,0,0) |
| P4 | (4,3,3) | (0,0,2) | (4,3,1) |
| 进程 | 最大需求 | 已分配 | 最多还需要 |
| P0 | (7,5,3) | (0,1,0) | (7,4,3) |
| P1 | (3,2,2) | (2,0,0) | (1,2,2) |
| P2 | (9,0,2) | (3,0,2) | (6,0,0) |
| P3 | (2,2,2) | (2,1,1) | (0,1,1) |
| P4 | (4,3,3) | (0,0,2) | (4,3,1) |
| 进程 | 最大需求 | 已分配 | 最多还需要 |
| P0 | (8,5,3) | (0,1,0) | (8,4,3) |
| P2 | (9,5,2) | (3,0,2) | (6,5,0) |
| P4 | (4,3,6) | (0,0,2) | (4,3,4) |
| 进程 | 最大需求Max矩阵 | 已分配Allocation矩阵 | 最多还需要Need矩阵 |
| P0 | (7,5,3) | (2,2,1) | (5,3,2) |
| P1 | (3,2,2) | (2,0,0) | (1,2,2) |
| P2 | (9,0,2) | (3,0,2) | (6,0,0) |
| P3 | (2,2,2) | (2,1,1) | (0,1,1) |
| P4 | (4,3,3) | (0,0,2) | (4,3,1) |